Physik für Pendler
Etwa 330 Jahre ist es her, seitdem Isaac Newton 1687 seine „axiomata sive leges motus“ veröffentlich hat. Lex prima, lex
secunda und lex tertia sind die Grundlagen der klassischen,
nicht-relativistischen Mechanik.
Das
lex secunda („2. Newtonsches Axiom“),
nachdem die auf einen Körper wirkende Kraft gleich der Änderung des Impulses mit der Zeit ist, ist Grundlage der
Impulserhaltung.
Der
vorliegende Beitrag erhebt keinen Anspruch auf Vollständigkeit, allenfalls
darauf Begeisterung für Mechanik und die Geschichte der Mechanik zu wecken! Es soll
auch nicht näher auf Grundlagen der Modellbildung, der numerischen Mathematik, der Energieerhaltung oder auch des
Drehimpulses oder exzentrischen Stoßes eingegangen werden. Dargestellt werden
soll ein Auszug aus den Grundlagen unserer Arbeit an einem spielerisch
zugänglichen Modell. Es wurde versucht, den Text auch für Nicht-Techniker
verständlich zu formulieren. Nichts desto trotz lassen sich technische
Zusammenhänge oft gut mit Formeln darstellen, weshalb diese nicht gänzlich
vermeidbar waren.
Der
Impulserhaltungssatz besagt nun, dass der Gesamtimpuls aller Stoßpartner eines
betrachteten Systems vor und nach dem Stoß identisch sein muss. Dies gilt
sowohl für elastische Stoßvorgänge (Stoßzahl k = 1) als auch für inelastische
(plastische, k = 0), hierzu später mehr. Bei ersteren bleibt die kinetische
Energie erhalten, bei letzteren wird eine Umwandlung in eine andere Energieform
(z. B. Wärme, „Formänderungsarbeit“ (dem Körper durch Formänderung zugeführte
Energie)) stattfinden. In der Realität sind diese Grenzfälle eher selten anzutreffen. Wirkliche Stoßvorgänge
wie z. B. auch Verkehrsunfälle verlangen daher eine Stoßzahl zwischen 0 und 1
(-1 < k < 0 bei Strukturversagen; -1 ist allerdings physikalisch nicht
korrekt, deshalb nur hilfsweise).
Anschaulich
lässt sich der Impulserhaltungssatz wie folgt herleiten.
Nach
Newton (1643 – 1727) gilt bereits:
![]()
Die
auf einen Körper einwirkende, konstante resultierende Kraft ist gleich dem
Produkt aus dessen Masse mal Beschleunigung („dynamisches Grundgesetz“).
Der
bei Stoßvorgängen meist sehr kurze Zeitabschnitt ![]() wird nun
verbunden mit der Formulierung der Beschleunigung als Ableitung der
Geschwindigkeit nach der Zeit
wird nun
verbunden mit der Formulierung der Beschleunigung als Ableitung der
Geschwindigkeit nach der Zeit
![]()
eingeführt.
Hieraus
![]()
folgt
![]()
Das
Produkt aus resultierender Kraft auf einen Körper und der Zeit wird als
Kraftstoß (in der Unfallrekonstruktion oft auch Stoßantrieb) bezeichnet. Das
Produkt aus Masse eines Körpers und seiner Geschwindigkeit nennt man Impuls ![]() – eine vektorielle Größe (gerichtete Größe,
Vorzeichen beachten…).
– eine vektorielle Größe (gerichtete Größe,
Vorzeichen beachten…).
Wirkt
keine äußere Kraft, so ist der Kraftstoß gleich Null; der Impuls des Körpers
bleibt unverändert. Innere Kräfte ändern den Impuls eines abgeschlossenen
Systems nicht; wegen actio = reactio
(lex tertia) heben sie sich paarweise auf.
Der
Impulserhaltungssatz ist damit für zwei Körper oder allgemein für n Körper wie
folgt formuliert:
![]()
Wobei
![]() die
Geschwindigkeiten der Massenmittelpunkte vor dem Stoß und
die
Geschwindigkeiten der Massenmittelpunkte vor dem Stoß und ![]() die
Geschwindigkeiten nach dem Stoß darstellen. Bei konstant bleibenden Massen
bedeutet dies, dass die Geschwindigkeit des einen Körpers kleiner und die
Geschwindigkeit des anderen größer wird.
die
Geschwindigkeiten nach dem Stoß darstellen. Bei konstant bleibenden Massen
bedeutet dies, dass die Geschwindigkeit des einen Körpers kleiner und die
Geschwindigkeit des anderen größer wird.
Übrigens:
die mathematische Formulierung der
Impulserhaltung (Impuls und Drehimpuls bzw. Drall) wird nicht Newton, sondern
Leonhard Euler (1707 – 1783) zugeschrieben. Deshalb spricht man oft auch von
Newton-Euler-Gleichungen.
Es
fehlen nun noch die Herren d’Alembert, Lagrange, Bernoulli und Poisson, dann
wären wesentliche Namen der klassischen
Mechanik genannt. Das würde hier aber zu weit führen.
Soviel
zur Theorie.
Ein
gutes Beispiel um sich die Theorie in der Praxis zu veranschaulichen stellt das
sogenannte Newton-Pendel dar. Die Anordnung geht zwar auf Edme Mariotte (1620 –
1684) zurück, basiert aber auf den Beobachtungen und den formulierten
Gesetzmäßigkeiten von Newton.
Übrigens:
ein anderes interessantes Pendel ist das Foucault’sche Pendel (1851) – das hat
mit dem Newton-Pendel zwar nichts zu tun, aber wenn man an einem freien
Wochenende mal die Erdrotation mit rel. einfachen Mitteln nachweisen muss,
sollte man einen solchen Versuch aufbauen.

Abb.
1 Newton-Pendel mit 5 Kugeln
In
Abb. 1 ist die Versuchsanordnung zu sehen, die vielen vielleicht bekannt vorkommt.
Hier sind 5 Kugeln (hoffentlich möglichst von gleicher Qualität, Form und
Werkstoffeigenschaften) in Reihe angeordnet. Lenkt man nun eine oder zwei der
außenliegenden Kugeln aus und lässt sie los, so kann man die immer wieder
faszinierende Mechanik und deren Gesetzmäßigkeiten beobachten.
Für
den Simulanten schreit das geradezu danach, das Experiment am Rechner
nachzubilden.
Das
haben wir getan!
Und
zwar mit der Genauigkeit, die ein handelsüblicher Meterstab beim Vermessen
hergibt. Der Kugeldurchmesser wird mit der Schieblehre abgenommen, aus der
Dichte von Stahl und dem errechneten Volumen ergibt sich die Masse einer Kugel.
Das Trägheitsmoment der Kugel ist praktischerweise um alle drei Achsen
identisch und muss nur einmal berechnet werden.
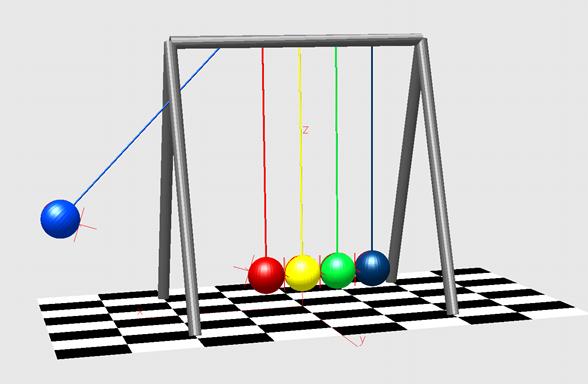
Abb.
2 Mehrkörper-Modell
Die
Abb. 2 illustriert das aufgebaute Modell in der Methodik der Mehrkörpersysteme
(MKS). Die Mehrkörperdynamik bzw. die Mehrkörpersimulation ist zu unterscheiden
von der wohl bekannteren Finite-Elemente-Methode (FEM)! Grundgedanke der MKS
ist die Nachbildung von (dynamischen) Systemen aus starren (wo notwendig teils
auch flexiblen) Körpern, die den unterschiedlichsten Kräften und Zwängen
unterworfen sind. Ziel ist es, das Zeitverhalten (z. B. Bewegungen,
Geschwindigkeiten, Beschleunigungen, Kräfte) zu studieren. Der herausragende
Vorteil der MKS ist, dass die meisten Modelle sehr geringe Rechenzeiten haben.
Das ist Voraussetzung, um bspw. an eine Echtzeit-Anwendung denken zu können
(wie z. B. das sog. Einspurmodell im ESP-Steuergerät eines modernen Kfz).
Das
hier vorgestellte Modell ist dann gleich ein Beispiel dafür, dass die
Rechenzeiten eher in den Bereich einer Kaffeepause gehen statt Richtung
Echtzeit (Achtung, Begriff wird oft falsch verwendet); ein wesentlicher Grund
hierfür wird später noch genannt.
Vereinfachend
werden die Kugeln statt an jeweils 2 Fäden an einem masselosen Fadenpendel
aufgehängt. Die Aufhängung wird reibungsfrei mit 1 Drehfreiheitsgrad
modelliert.
Die
Körper (in diesem Fall Kugeln) werden mit den gewünschten Eigenschaften
nachgebildet. Entscheidend sind in diesem einfachen Fall die
Kontaktsteifigkeiten und –dämpfungen. Durch Auswahl und Zuweisung
entsprechender sogenannter Kraftelemente in der Software wird dafür gesorgt,
dass der Zusammenstoß zweier benachbarter Kugeln erkannt und entsprechend
behandelt wird. D.h. durch Aufbau von Kräften entsprechend den hinterlegten
Kraft-Weg- bzw. Kraft-Geschwindigkeits-Zusammenhängen. Ebenso berücksichtigt
werden muss, dass die Kugeln nicht immer an der gleichen Stelle zusammenstoßen
müssen, der Kontaktpunkt kann also über die Kugeloberfläche wandern. Für die
Kontaktpaarung Stahl – Stahl werden natürlich sehr hohe Steifigkeiten verbunden
mit niedrigen Dämpfungen benötigt. Eine solche Parametrierung führt
erfahrungsgemäß zu rel. hohen Rechenzeiten (Schrittweiten müssen sehr klein
gewählt werden, System sehr „steif“); das soll hier aber nicht das Thema sein.
Die
Grundlagen für die Berechnung eines solchen Kontaktes („Hertzsche Pressung“, 1881) wurden übrigens durch Heinrich Hertz
(1857 – 1894) gelegt, der v.a. aufgrund seines Nachweises der Existenz
elektromagnetischer Wellen bekannt ist.
Eine
Steifigkeit c ist als ein Zusammenhang zwischen einer Kraft F und einem Weg s
in der Form
![]() in der Einheit
in der Einheit ![]()
definiert.
Die
erste Kugel (hellblau in Abb. 2) wird um PI/4, also 45° ausgelenkt. Aus dieser
Anfangsbedingung heraus wird der Solver (Löser der in Matrizenform vorliegenden
Bewegungsdifferentialgleichungen durch Zeitintegration) gestartet, um das
Zeitverhalten des Systems aufzulösen.
In
der Zwischenzeit kann man sich schon mal (analytisch) Gedanken machen, mit
welcher Geschwindigkeit wohl die Kugel 1 auf die Kugel 2 (rot) auftrifft.
Es
hilft eine einfache Energiebilanz nach dem Schema
![]()
Die
Höhendifferenz ![]() ergibt sich
trigonometrisch mit dem Winkel
ergibt sich
trigonometrisch mit dem Winkel ![]() und der
bekannten Pendellänge
und der
bekannten Pendellänge ![]() , der
Differenz z1 zwischen den beiden Längenmaßen
aus
, der
Differenz z1 zwischen den beiden Längenmaßen
aus
![]()
folgt ![]()
und
![]() .
.
Der
Energieansatz ergibt nach Wegkürzen der Masse die Geschwindigkeit der Kugel 1
vor dem Stoß:
![]()
Die
Kugel 1 bringt demnach folgenden Impuls ![]() mit:
mit:
![]()
Hinweis:
In
den nachfolgenden Diagrammen ist die x-Achse immer die Zeitachse und die
y-Achse die Geschwindigkeitsachse bzw. die Kraftachse.
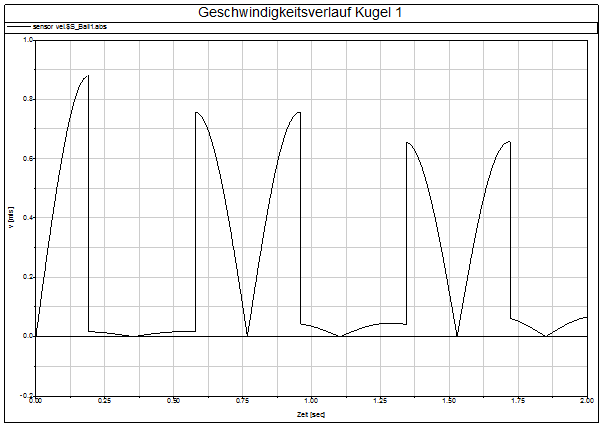
Abb.
3 Geschwindigkeitsverlauf Kugel 1
Wir
vergleichen mit den Ergebnissen der MKS-Rechnung, siehe Abb. 3. Die Kugel
startet logischerweise bei ![]() und erreicht
ihre maximale Geschwindigkeit am Nulldurchgang, wo sie dann schlagartig durch
Kugel 2 abgebremst wird. Das Maximum bei knapp
und erreicht
ihre maximale Geschwindigkeit am Nulldurchgang, wo sie dann schlagartig durch
Kugel 2 abgebremst wird. Das Maximum bei knapp ![]() beträgt relativ
genau
beträgt relativ
genau ![]() (im Folgenden
mit
(im Folgenden
mit ![]() bezeichnet) –
wie oben analytisch hergeleitet. Die Kugel wird diese Geschwindigkeit nicht
mehr erreichen – in realen Systemen gibt es immer Dämpfung, die Energie
„auffrisst“ oder technischer formuliert in eine andere Energieform umwandelt
(z. B. Wärme). Die Struktureigendämpfung von Stahl wurde mit 2 % angenommen
(der Wert berechnet sich überschlagsmäßig aus der bewegten Masse und der
verwendeten Steifigkeit).
bezeichnet) –
wie oben analytisch hergeleitet. Die Kugel wird diese Geschwindigkeit nicht
mehr erreichen – in realen Systemen gibt es immer Dämpfung, die Energie
„auffrisst“ oder technischer formuliert in eine andere Energieform umwandelt
(z. B. Wärme). Die Struktureigendämpfung von Stahl wurde mit 2 % angenommen
(der Wert berechnet sich überschlagsmäßig aus der bewegten Masse und der
verwendeten Steifigkeit).
Dies
zeigt dann auch deutlich Abb. 4. Dort ist im Vergleich der
Geschwindigkeitsverlauf von Kugel 1 (links außen) und Kugel 5 (rechts außen)
dargestellt.
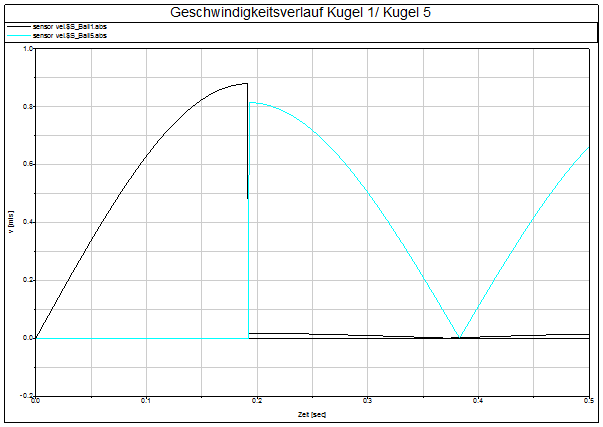
Abb.
4 Geschwindigkeitsverlauf Kugel 1 / Kugel 5
Die
Kugel 5 (hellblau) erreicht beim erstmaligen Kontakt ![]() nicht das Geschwindigkeitsniveau von Kugel 1
(schwarz). Kugel 5 wird also beschleunigt, während Kugel 1 fast auf 0 m/s
abgebremst wird. Was passiert aber mit den Kugeln 2, 3 und 4?
nicht das Geschwindigkeitsniveau von Kugel 1
(schwarz). Kugel 5 wird also beschleunigt, während Kugel 1 fast auf 0 m/s
abgebremst wird. Was passiert aber mit den Kugeln 2, 3 und 4?
Diese
laufen mit derselben Geschwindigkeit der Kugel 1 (nahe Null) mit. Das ist neben
der Dämpfung auch der hauptsächliche Grund dafür, dass nicht der gesamte,
eingebrachte Impuls der Kugel 1 über alle mittleren Kugeln an die Kugel 5
weitergegeben wird. Ein Teil des Anfangsimpulses bleibt also „hängen“. Der
Impulserhaltungssatz wird nicht verletzt.
Näherungsweise lassen sich aus folgender Abb. 5 die Geschwindigkeiten der Kugel 1 vor und die der Kugeln 1 – 5 nach dem Stoß ablesen:
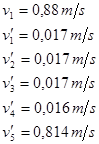
Es
gilt der Impulserhaltungssatz (die Massen aller Kugeln werden als identisch
angenommen):
![]()
Da
alle 5 Kugeln einen postkollisionären
Impuls abbekommen muss bei gerechtfertigter Annahme der Massenerhaltung der
Kugeln über der Zeit (was wir hoffen wollen…; Massen können sich aber auch
ändern wie z.B. bei Raketen, wo der Treibstoff im Verhältnis zum Gesamtgewicht
beträchtlich ist und mit zunehmender Zeit weniger wird, formuliert durch
Konstantin Ziolkowski 1903 in der sog. „Rakentengleichung“.
Man kann aber auch auf dem Boden bleiben und könnte sich ein Beispiel aus der
Unfallrekonstruktion vorstellen, wie z.B. ein herausgerissener Motorblock
infolge einer kapitalen Kollision) gelten:

Die
vorkollisionären Geschwindigkeiten sind aus der Anschauung heraus auf 0 zu
schätzen – die Terme fallen weg. Die Ergebnisse der Simulation sind also
plausibel.
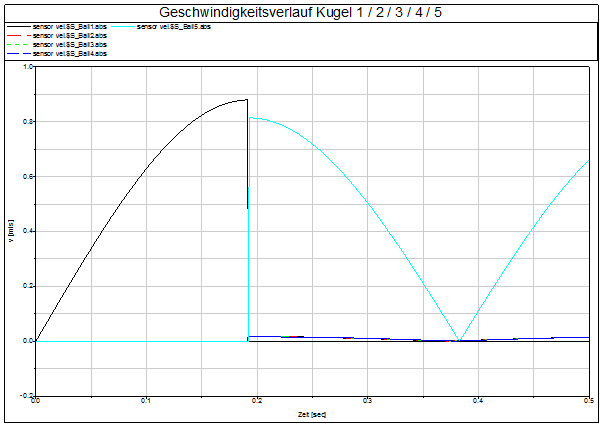
Abb. 5
Geschwindigkeitsverlauf aller Kugeln
Der
nahezu gleichzeitige und verzugslose Anstieg der Geschwindigkeit der Kugel 5
von 0 auf 0,81 m/s könnte auch als sogenannter Dirac-Stoß (zeitlich gesehen
zunächst zwischen Kugel 1 und Kugel 2, anschließend aber auch alle folgenden
Kontakte) interpretiert werden. Schauen wir uns dazu folgende Abb. 6 an.
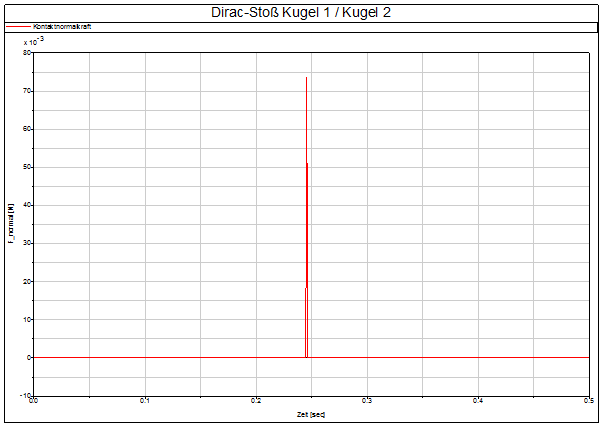
Abb. 6 Dirac-Stoß
Die
Kontaktnormalkraft wird in infinitesimaler Zeit quasi unendlich groß, d.h. die
Kollisionsdauer ist sehr kurz. Hier offenbart sich ein bekanntes „Problem“ der
numerischen Simulation. In Abb. 6 ist ein sehr schmaler peak zu sehen,
theoretisch müsste dieser kurz vor ![]() (vgl. Abb. 5) beginnen.
Der Kontakt selbst wird zwar erkannt, wegen der sehr hohen Steifigkeit und der
äußerst geringen Kontaktdauer darf die Kontaktkraft jedoch nicht verwendet
werden. Die errechnete Kraftamplitude in Abb. 6 ist demnach mit Vorsicht zu
genießen! Für die Zeitauflösung der eigentlichen Kollisionsphase in Kompression
und Restitution gilt gleiches!
(vgl. Abb. 5) beginnen.
Der Kontakt selbst wird zwar erkannt, wegen der sehr hohen Steifigkeit und der
äußerst geringen Kontaktdauer darf die Kontaktkraft jedoch nicht verwendet
werden. Die errechnete Kraftamplitude in Abb. 6 ist demnach mit Vorsicht zu
genießen! Für die Zeitauflösung der eigentlichen Kollisionsphase in Kompression
und Restitution gilt gleiches!
Die
Stoßkraft ist also nicht definiert (Stichwort Stoßhypothese nach Newton bzw. Poisson).
In
der Systemtheorie dynamischer Systeme wird ein derartiges Ereignis auch als Singularität bezeichnet.
Wollte
man nun sämtliche Geschwindigkeiten analytisch bestimmen, so müsste zunächst
postuliert werden, dass die Stöße nicht gleichzeitig sondern kurz nacheinander
stattfinden. Ansonsten stünden nur 2 Gleichungen (Impulssatz und
Energieerhaltung) für 5 Kugeln und deren unbekannte Geschwindigkeiten zur
Verfügung.
Alternativ
könnte man statt der Energieerhaltung auch die Stoßzahl mit ins Spiel bringen.
Die
Stoßzahl ![]() bezeichnet in
Prinzip ein Verhältnis der Geschwindigkeitsdifferenzen der beteiligten Körper
vor und nach dem Stoß.
bezeichnet in
Prinzip ein Verhältnis der Geschwindigkeitsdifferenzen der beteiligten Körper
vor und nach dem Stoß.
![]()
Um
nun die Stoßzahl für die Kugelkontaktpaarung zu ermitteln, lässt man einfach
die Kugeln 3 – 5 komplett aus dem Spiel, so dass Kugel 2 frei wegschwingen
kann:
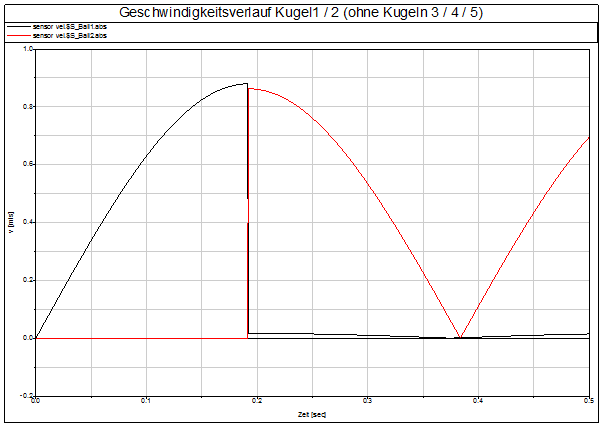
Abb. 7
Geschwindigkeitsverlauf Kugel 1 / 2 (ohne Kugeln 3/4/5)
Die
Stoßzahl ergibt sich aus den abgelesenen Geschwindigkeiten zu
![]()
Das liegt nahe am vollelastischen Stoß (wie bspw. auch bei Billardkugeln), für den gilt:
![]()
Nun
ließe sich mit der errechneten Stoßzahl aus dem Einzelstoß-Experiment die
Geschwindigkeit der Kugel 5 nach dem Stoß errechnen.
![]()
Selbstverständlich
ist die Rechnung fehlerbehaftet, denn die Impulse der Kugeln 2, 3 und 4 sind
nicht berücksichtigt worden.
Subtrahiert
man diese von ![]() , so kommt man mit
, so kommt man mit
![]()
auf
den zuvor simulatorisch ermittelten Wert.
Abschließend
sind 2 kurze Videos abgelegt, die die Stoßvorgänge einmal für die
Anfangsbedingung „eine ausgelenkte Kugel“ und zum zweiten „zwei ausgelenkte
Kugeln“ illustrieren sollen.
Wie
darin zu sehen, verhalten sich die anderen Kugeln wie bereits erwähnt nicht
gänzlich still, an den mittleren Kugeln bleiben also Impulse „hängen“.
Hierbei
spielen auch die Spalte zwischen den Kugeln eine Rolle. Diese sollen
sicherstellen, dass die Stöße voneinander unabhängig stattfinden, d.h. zeitlich
nacheinander, wenn auch nur Sekundenbruchteile. Diese Forderung ist notwendig,
wenn das Kugelstoß-Pendel „ordentlich“ funktionieren soll.
Die
Luftspalte haben dann jedoch zur Folge, dass nicht mehr nur in Normalrichtung
zwischen den Kugeln Kräfte entstehen, sondern kleine Kräfte auch in
Tangentialrichtung.
Fazit:
Ein
Spielzeug mit ein paar Kugeln, das jedoch bei näherer Betrachtung nicht mehr so
trivial daherkommt, wie man vielleicht denken könnte.
Die
so einfach erscheinende Mechanik fasziniert immer wieder und die in den letzten
Jahrhunderten geschaffenen Grundlagen sind nach wie vor unerlässlich. Die
Erkenntnisse, die die Herren Newton und Co. damals ohne Digitalrechner gewannen
sind heute immer noch gültig, auch wenn erst Einstein die Newtonsche Mechanik
quasi zum Grenzfall der Relativitätstheorie „degradierte“.
Die Modellbildung hat ihre Tücken und nur bei Kenntnis der in der Software programmierten Gesetzmäßigkeiten sind deren Grenzen ersichtlich und die Ergebnisse lassen sich entsprechend bewerten.
Übrigens: Schon lange bevor Newton & Co. über Impulsen grübelten, gab es erste, jedoch wohl eher unfreiwillige (gut, könnte auch eine frühe Form von Billard gewesen sein ;-) Versuche dazu. Beteiligt waren die Erde und der ein oder andere Meteorit. Die These amerikanischer Forscher um Marc Boslough ist nun, dass die durch den Einschlag eines Meteoriten auf der Südhalbkugel erzeugte Druckwelle am Antipoden (auf der gegenüberliegenden Seite) noch ausreichend Energie inne hat, um Vulkane zu erzeugen. Der Meteorit soll einen Durchmesser von etwa 8 km gehabt haben; durch den Impuls beim Stoß läuft eine Front seismischer Wellen mit ~ 13.000 km/h durch die Erdkugel, bis sie ca. 1,5 h später auf der anderen Seite ankommt (dort kann dann der Impuls nicht weitergegeben werden, weil keine 2. Erdkugel am Pendel hängt). Simulatorisch konnte man das sogar nachweisen, hierzu langt aber eine MKS-Starrkörper-Rechnung auf der workstation nicht mehr aus. Es müssen kontinuumsmechanische Berechnungen (FEM) mit einer nahezu unvorstellbar großen Anzahl von Freiheitsgraden durchgeführt werden.
In der Rechtsmedizin oder auch aus Verkehrsunfällen ist der Effekt der Antipoden-Veränderung als Contre-Coup-Mechanismus bekannt. Wird bspw. ein durch eine Frontalkollision nach vorne fallender Schädel durch ein Hindernis wie ein Lenkrad abrupt abgebremst, so soll nicht nur auf der Seite der Einwirkung (vorne), sondern auch hinten am Kopf eine Hirnschädigung (innen, durch Kontakt zwischen Hirnmasse und Schädel) zu erwarten sein.
In diesem
Sinne: „again what learned“ frei nach Loddar M.
Anmerkung:
Für
viele der hier verwendeten Begrifflichkeiten, Personen oder Sachverhalte sind
in wikipedia mittlerweile Einträge vorhanden. Die Beiträge sind meist
verständlich formuliert und die (wissenschaftliche) Qualität ist meist auf
hohem Niveau. Für weiteres Verständnis oder tieferes Interesse lohnt sich also
durchaus ein Klick dorthin.
Hinweis zur Darstellung: die Formeln werden mit dem Mozilla Firefox wesentlich besser dargestellt als mit dem MS Internet Explorer. Deswegen im Zweifelsfalle den Feuerfuchs verwenden (empfiehlt sich sowieso...).